- July 2024: I hosted members from Robotics Laboratory Lab as the main speaker, presenting my drone and unmanned vehicle projects.
- May 2024: I officially joined the UW-Madison ARC Lab as a member.
- Apr 2024: I participated in the UW-Madison Engineering EXPO as a main representative of ARC LAB.
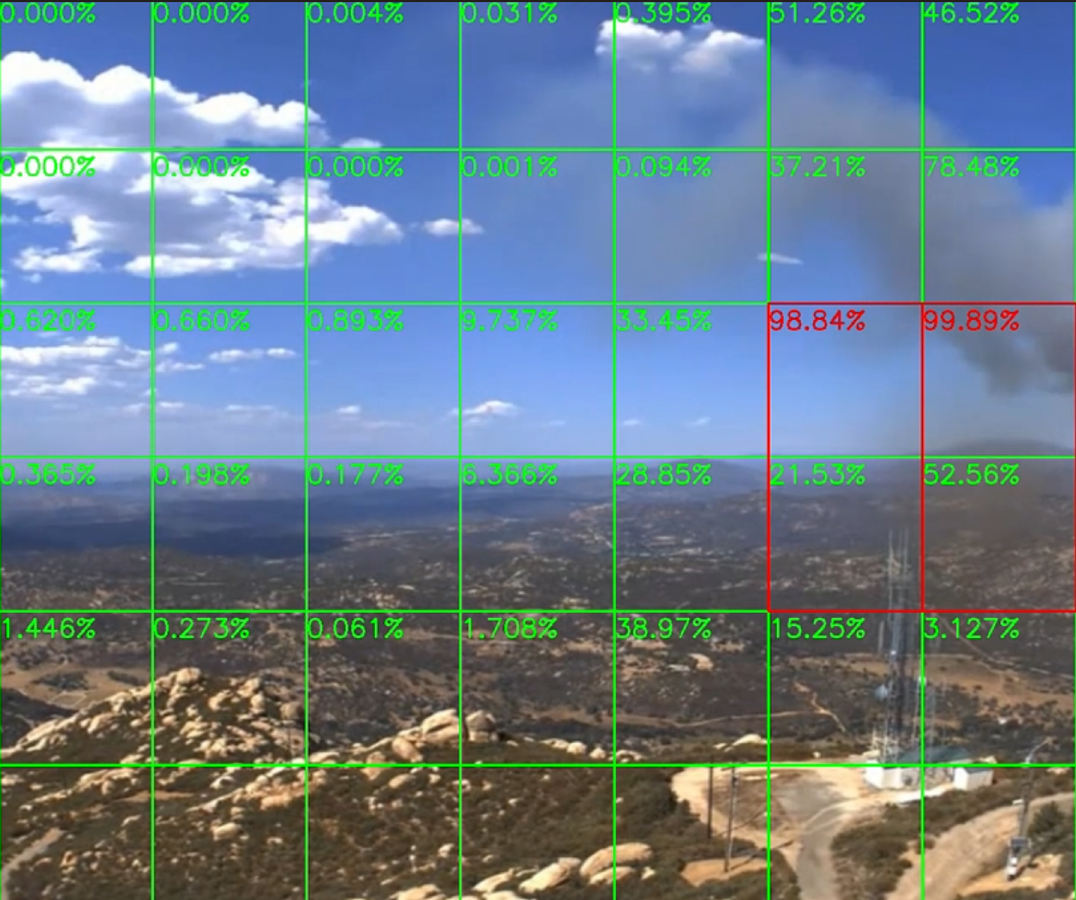
- Aug 2023: Our survey on Wildfire detection via transfer learning has been published to SIVP 2024.
- Apr 2023: My senior design Tonkla was awarded the Best in Show at the UIC Engineering EXPO.
Hello, I'm Tianxiao Ye
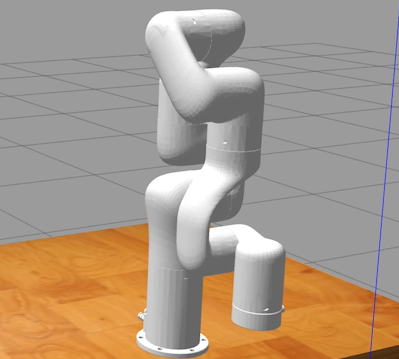
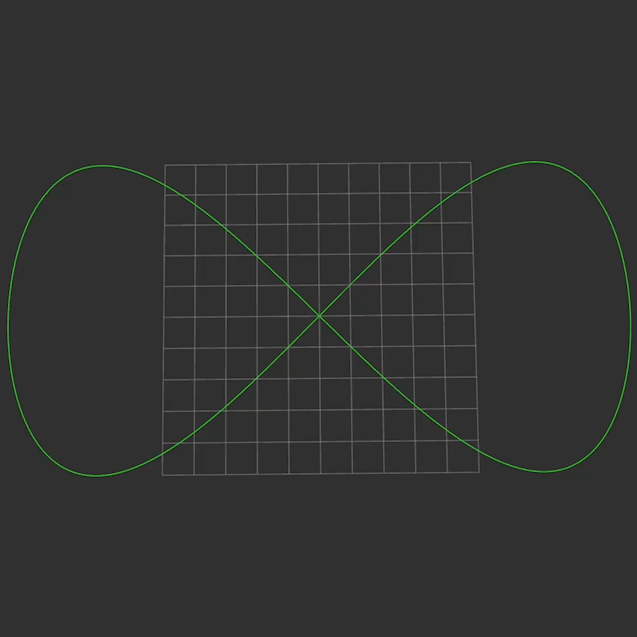
I am a researcher and engineer in Robot dynamics and control. I am pursuing my thesis-based M.S. at the University of Wisconsin-Madison where I am being advised by Xiangru Xu and will graduate in May 2025.
Before this, I spent a year as an exchange student at the University of Illinois at Chicago where I was advised by A. Enis Cetin and received my B.S. in Robotics Engineering from Harbin Institute of Technology in 2023.


{kind=link}